Intention pédagogique : Amener les enfants en dyade à créer, en utilisant les objets de la classe, des tunnels que Blue-Bot pourra traverser après avoir été programmée.
Brève description de l’activité
Amorce
L’enseignante explique le défi aux enfants. Les enfants auront une dizaine de minutes pour créer, en équipes de 2, un tunnel qui respecte les 3 conditions suivantes :
Être assez haut pour que Blue-Bot puisse le traverser;
Être suffisamment large pour ne pas qu’elle reste coincée à l’intérieur;
Être suffisamment solide pour qu’il n’y ait pas de risque qu’il s’effondre sur elle et la blesse.
Elle invite à exprimer ce qu’ils connaissent des tunnels. Elle peut aussi leur montrer des images de tunnels ou leur donner un peu de temps pour feuilleter des livres sur les tunnels.
Réalisation
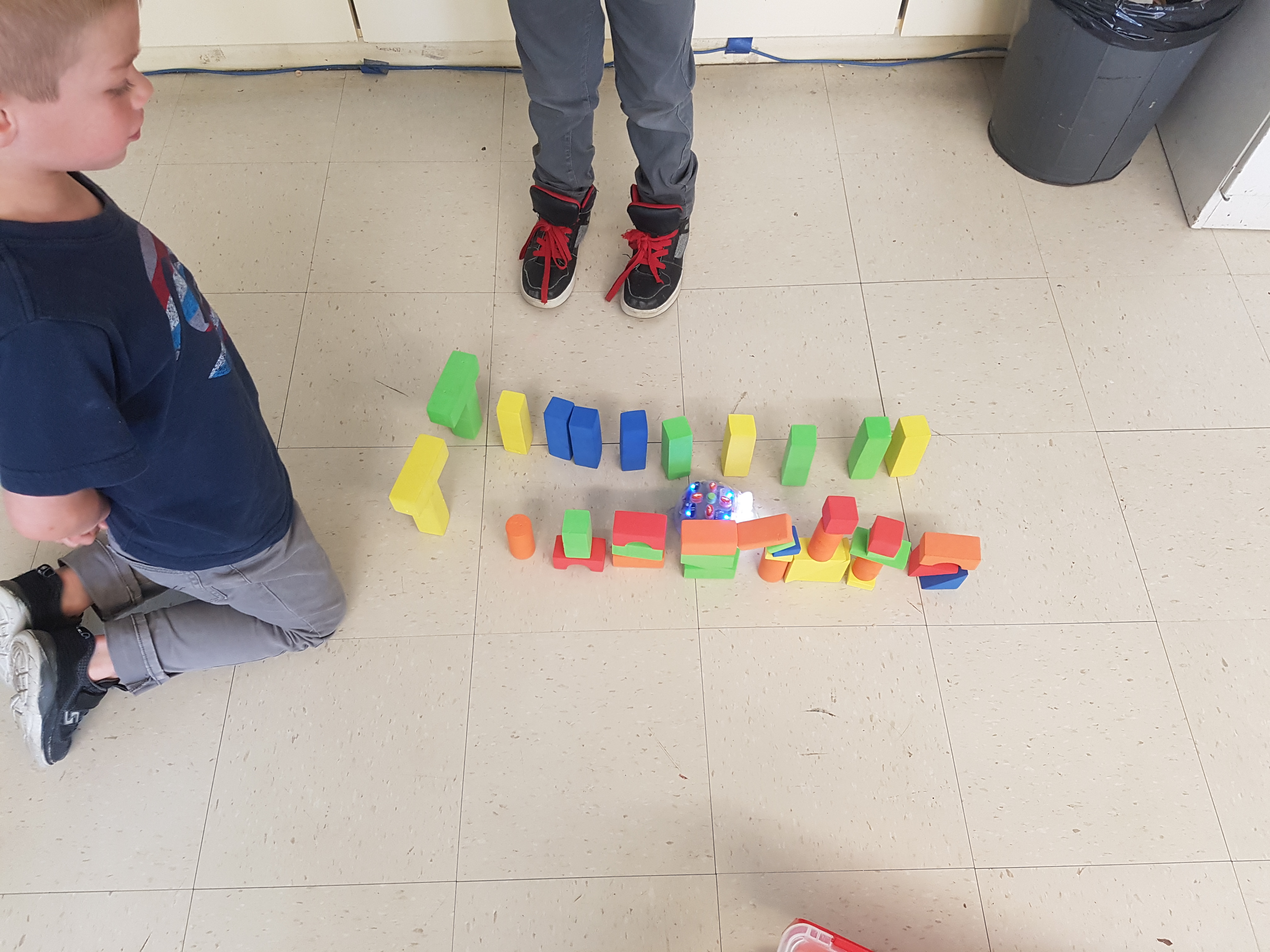
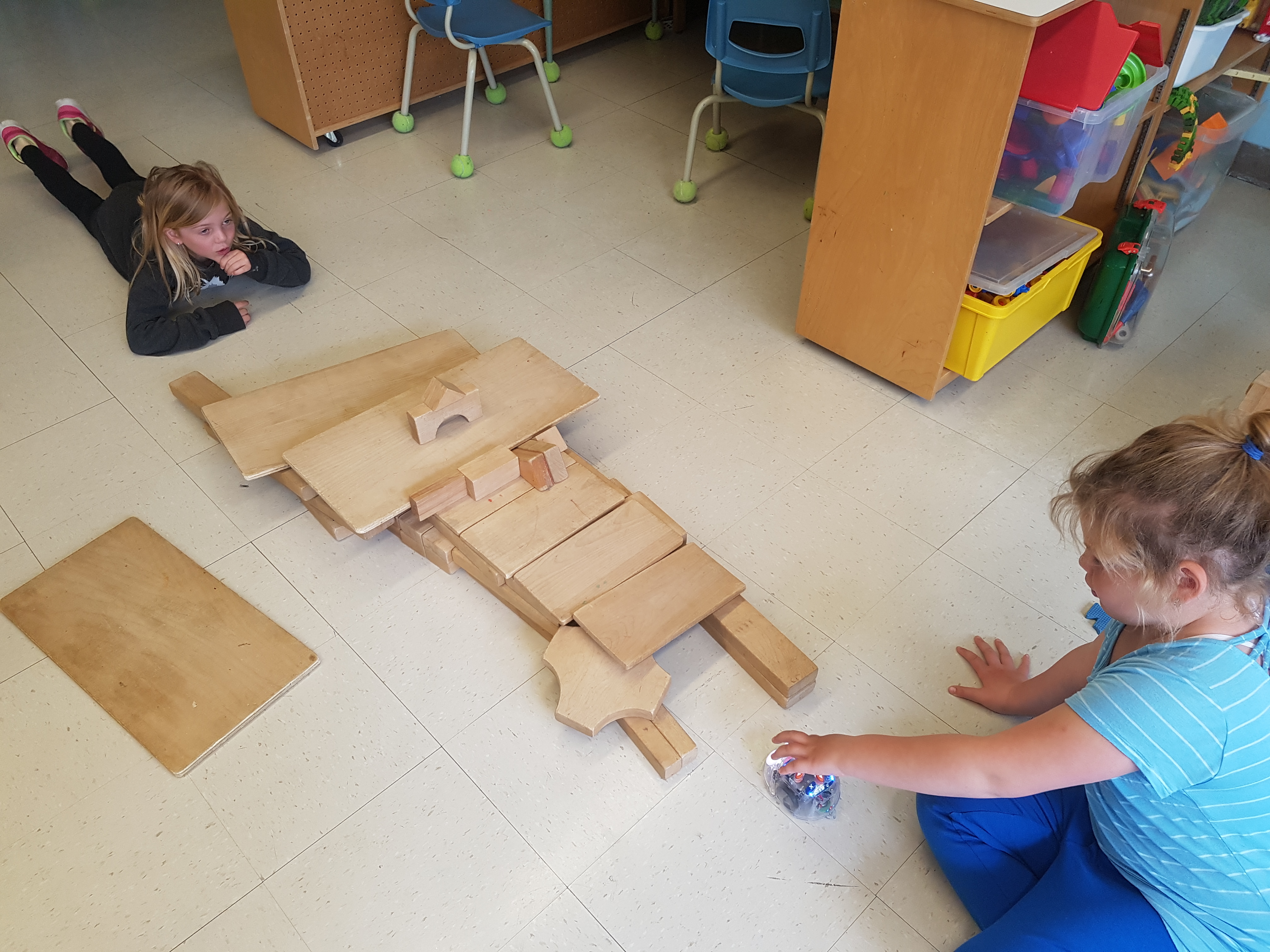
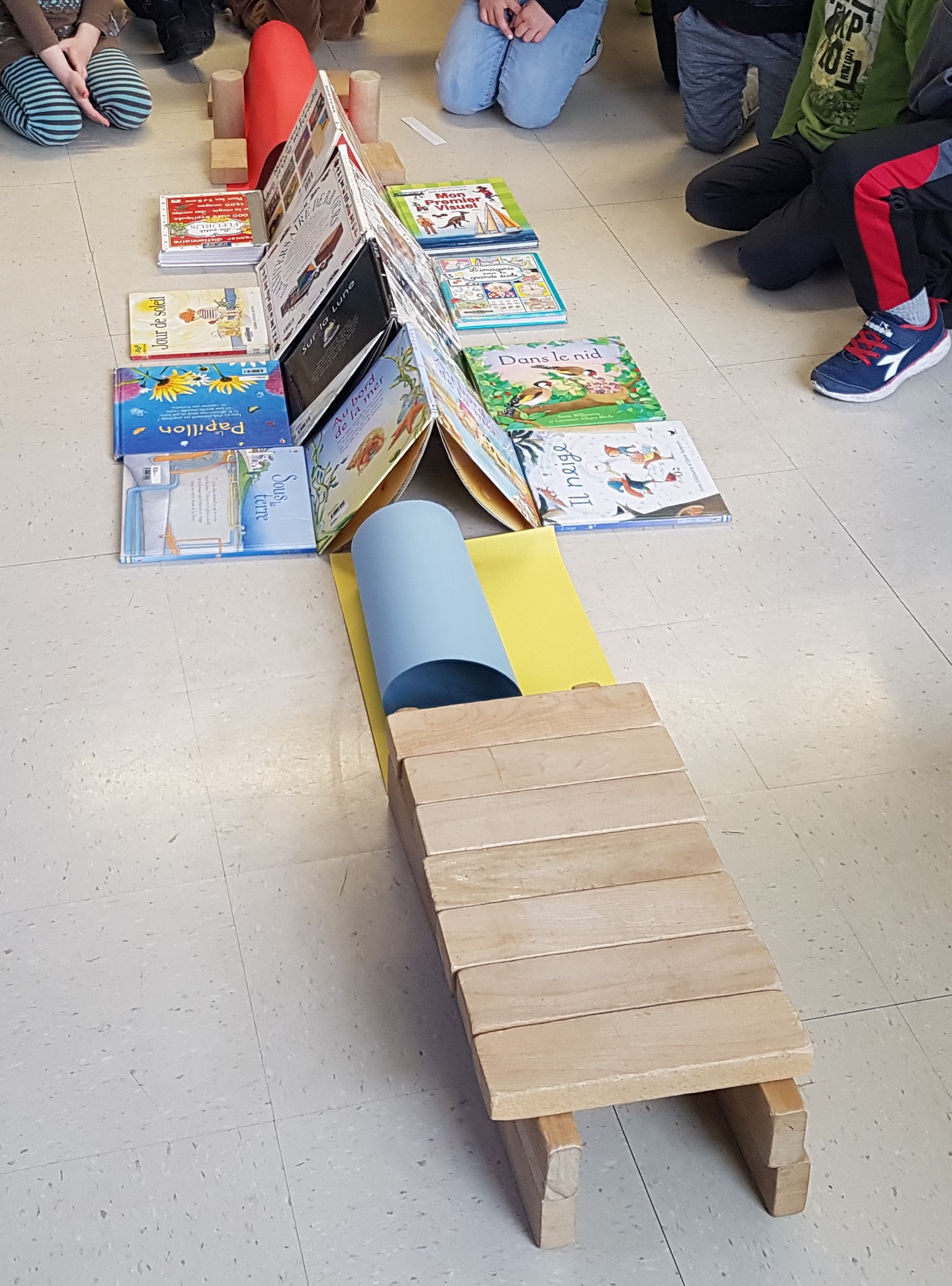
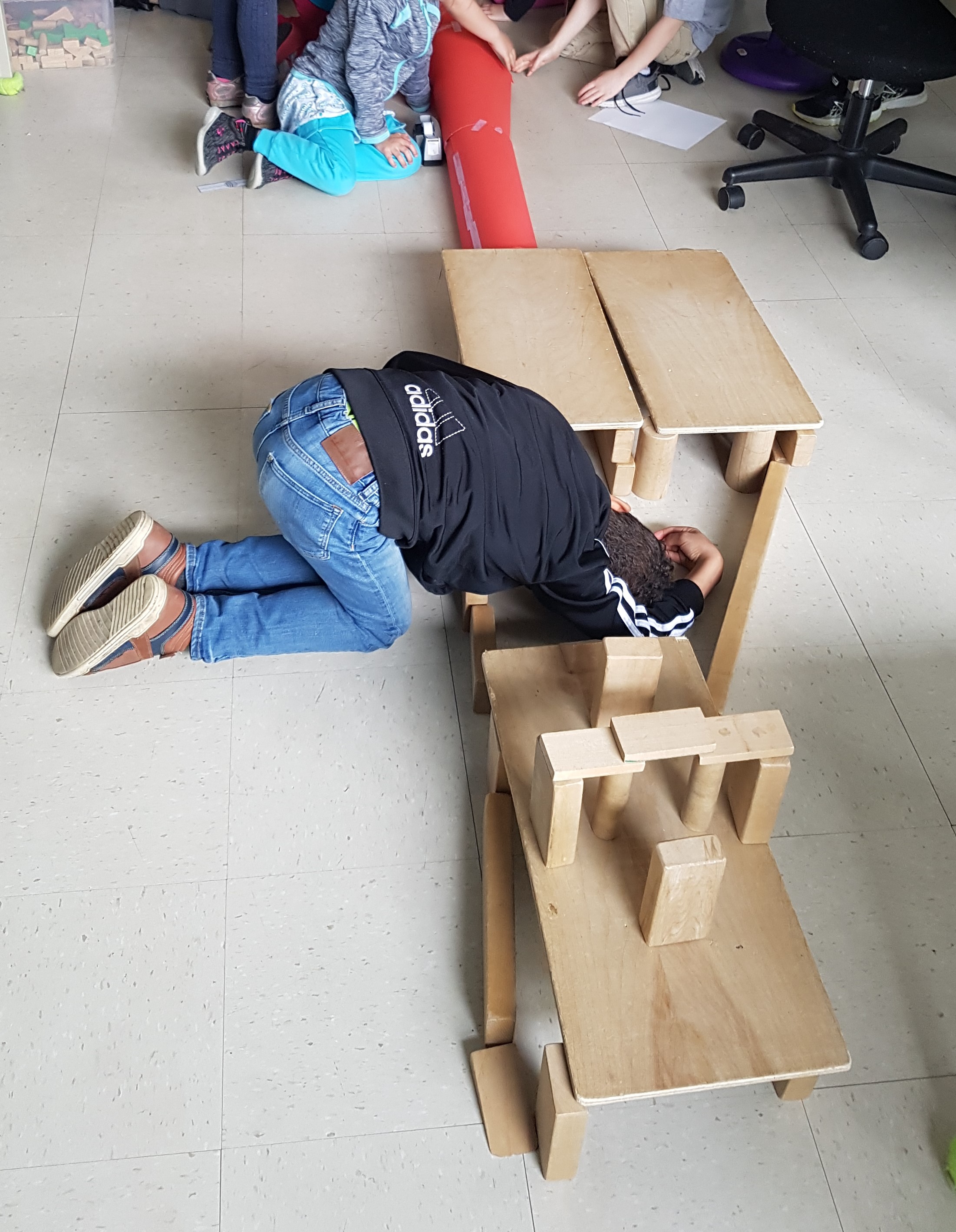
En dyade, les enfants créent leur tunnel à l’aide des matériaux disponibles dans la classe.
Lorsque tous les tunnels ont été créés, on permet à Blue-Bot de les traverser en la programmant et on discute des problèmes rencontrés si nécessaire.
Si Blue-Bot ne réussit pas à traverser un tunnel, on tente, en grand groupe, de trouver une solution pour modifier la construction afin que Blue-Bot puisse le traverser.
Intégration
Il est important de faire un retour avec les enfants sur les apprentissages réalisés au cours de l’activité (difficultés rencontrées, matériaux utilisés, temps de réalisation, durabilité du tunnel, etc.).
Liens avec le programme
Domaine et compétence ciblés
Cognitif
Pensée et stratégies
Domaines et compétences sollicités
Social
Habiletés sociales
Langagier
Langage oral
Matériel requis
Robot Blue-Bot
Les enfants doivent utiliser ce qu’ils trouvent autour d’eux (blocs, livres, carton, LEGO, etc.)
Quelques photos
Vidéo
Auteure : Sacha Vermeys, enseignante au CSS des Hautes-Rivières
Canevas créé par la CSSDHR, le Service national du RÉCIT à l’éducation préscolaire et l'UQAM pour CAp Robotique (MEES, 2018-2019)